Hello Codeforces, and the legends of across $$$999$$$ and more rounds!
wuhudsm, Yugandhar_Master, and I are beyond excited to invite you to Codeforces Round 1000 (Div. 2) at 22.01.2025 15:05 (Московское время). Please note the unusual time of the round ($$$\color{red}{2.5}$$$ hours before the usual time)!
The contest contains $$$6$$$ carefully crafted tasks, one of them divided into two subtasks, to be solved in $$$2$$$ hours. You will solve tasks themed around Little John and his shenanigans aimed towards getting his own dream home (featuring, probably, galvanized square steel).
This round could not exist without the thankful help of these so many people:
- FairyWinx for
rejecting more tasks than are used in the final problemset,coordinating the round and translating the problems; - rewhile for some very important "technical assistance";
- the testers of Codeforces Round 960 (Div. 2), who had tested a non-empty subset of the problemset;
- antontrygubO_o for nutella testing;
- Dominater069, _istil, Error_Yuan, Monogon, awesomeguy856 for red testing;
- defnotmee, Proof_by_QED, -firefly-, Intellegent, efishel, priyanshu.p, amoeba4, evenvalue, cry, LMeyling, temporary1 for yellow testing;
- Wxssim, HusseinFarhat, Mukundan314, turska, rewhile, redheadphone for purple testing;
- Dragokj03, VladiG, b00s, SirPh, mathtsai, hashman, redpanda, larush, satyam343, antares2262, ismailfateen for blue testing;
- Valenz, shuniko for cyan testing;
- Dominater069 for identifying as green;
- tibinyte2006 for legendary-fake-lying-face grey testing;
- a few people who were invited to test but forgot/didn't have time for it;
- a few people who tested $$$\mathcal{O}(1)$$$ tasks individually but not the entire problemset;
- MikeMirzayanov for great platforms Codeforces and Polygon;
- and last but not least, You for participating! Thank you for writing legends in real-time for across $$$999$$$ and more rounds!
The score distribution is as follows.
Before finishing the announcement, I would like to spoil you a little of how the round's story ends.
Little John worked hard, honest and diligent for years, and finally got a home of his dream.
In that sense, I want You to be like Little John in this round.
Hard, honest and diligent will give you the rewards you deserve.
Anyways, that's all for the announcement; Good luck, and have fun!
UPD1: The score distribution has been announced.
UPD2: The editorial is posted here. Also we have good news that I will post as a separate report blog soon...
UPD3: Congratulations to the winners!
All participants:
- sunjia (oops, the user is gone now)
- Golovanov399
- maspy
- jiangbowen
- A_G
- fnoihzhyan
Rated only:
- sunjia (oops, the user is gone now)
- fnoihzhyan
- RGB_ICPC9
- wangzirui123
- Network_Error
- BSpioneer
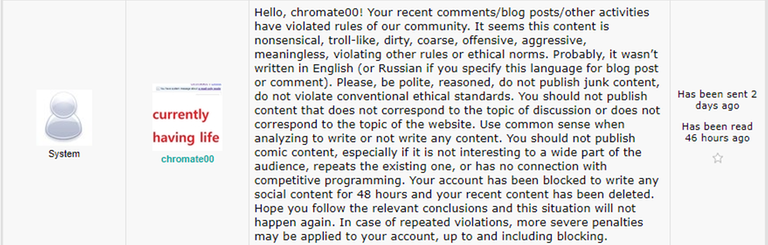
UPD4: Anti-LLM Evaluation Report is published — the first of its kind for Div.2! Please kindly take a look if you have some free time or are just interested.